Biohybrid robots work by combining biological components like muscles, plant material, and even fungi with non-biological materials. While we are pretty good at making the non-biological parts work, we’ve always had a problem with keeping the organic components alive and well. This is why machines driven by biological muscles have always been rather small and simple—up to a couple centimeters long and typically with only a single actuating joint.
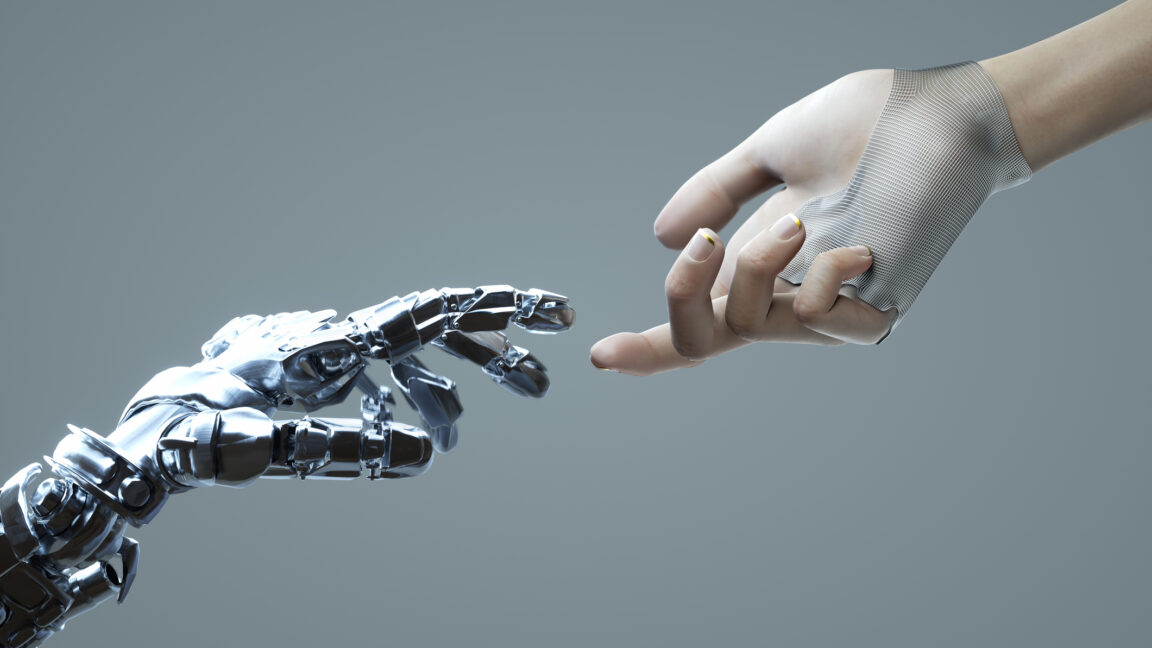
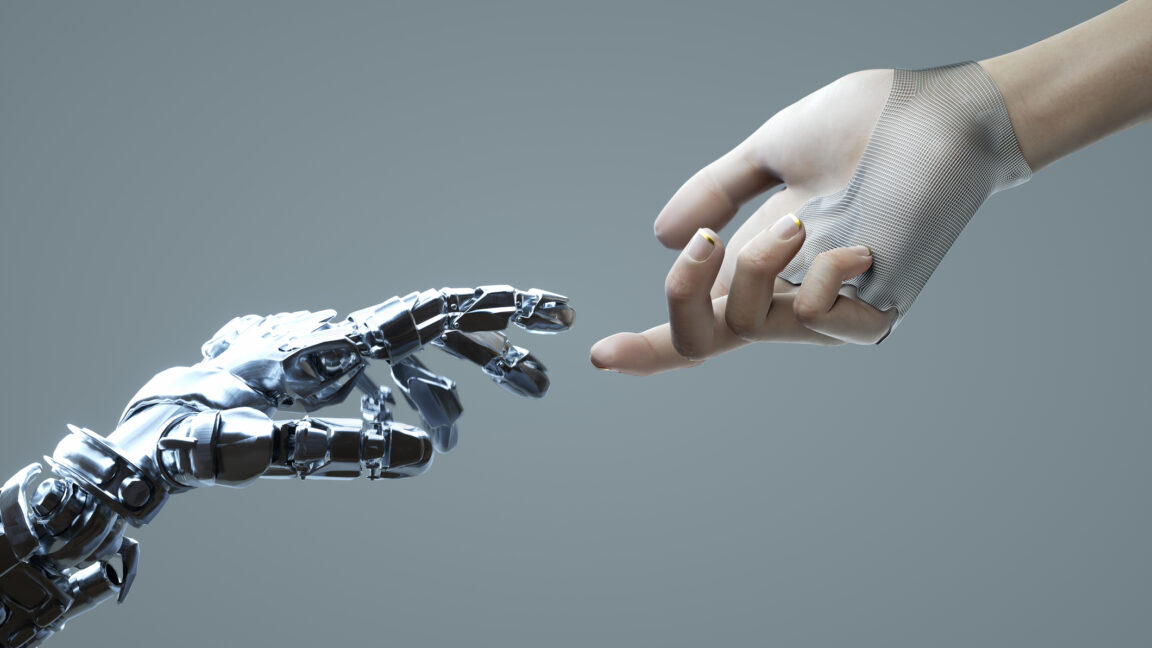
“Scaling up biohybrid robots has been difficult due to the weak contractile force of lab-grown muscles, the risk of necrosis in thick muscle tissues, and the challenge of integrating biological actuators with artificial structures,” says Shoji Takeuchi, a professor at the Tokyo University, Japan. Takeuchi led a research team that built a full-size, 18 centimeter-long biohybrid human-like hand with all five fingers driven by lab-grown human muscles.
Keeping the muscles alive
Out of all the roadblocks that keep us from building large-scale biohybrid robots, necrosis has probably been the most difficult to overcome. Growing muscles in a lab usually means a liquid medium to supply nutrients and oxygen to muscle cells seeded on petri dishes or applied to gel scaffoldings. Since these cultured muscles are small and ideally flat, nutrients and oxygen from the medium can easily reach every cell in the growing culture.
When we try to make the muscles thicker and therefore more powerful, cells buried deeper in those thicker structures are cut off from nutrients and oxygen, so they die, undergoing necrosis. In living organisms, this problem is solved by the vascular network. But building artificial vascular networks in lab-grown muscles is still something we can’t do very well. So, Takeuchi and his team had to find their way around the necrosis problem. Their solution was sushi rolling.
The team started by growing thin, flat muscle fibers arranged side by side on a petri dish. This gave all the cells access to nutrients and oxygen, so the muscles turned out robust and healthy. Once all the fibers were grown, Takeuchi and his colleagues rolled them into tubes called MuMuTAs (multiple muscle tissue actuators) like they were preparing sushi rolls. “MuMuTAs were created by culturing thin muscle sheets and rolling them into cylindrical bundles to optimize contractility while maintaining oxygen diffusion,” Takeuchi explains.